









Multiway RCS

-
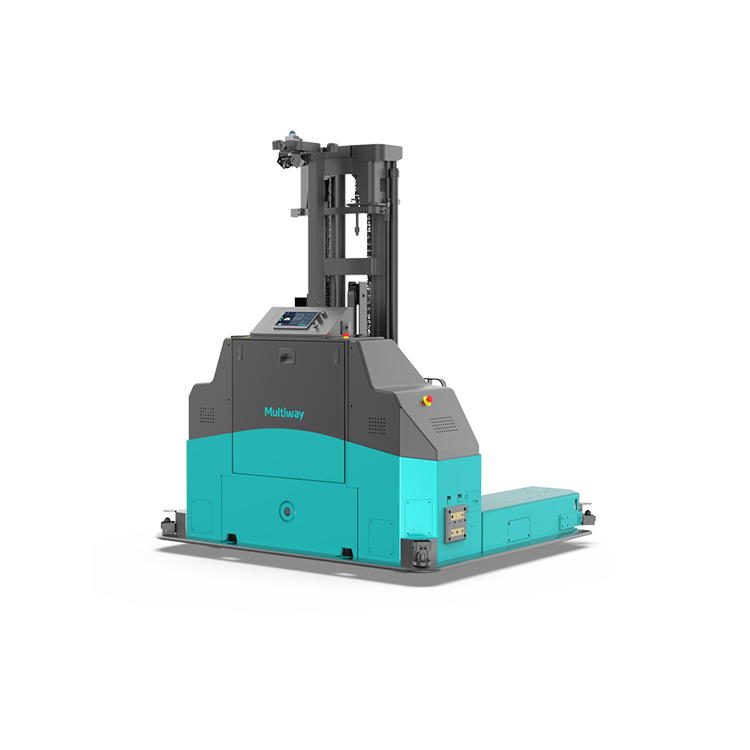
Carretilla Automatizada
Soluciones informáticas
Carretilla Automatizada
Soluciones informáticas
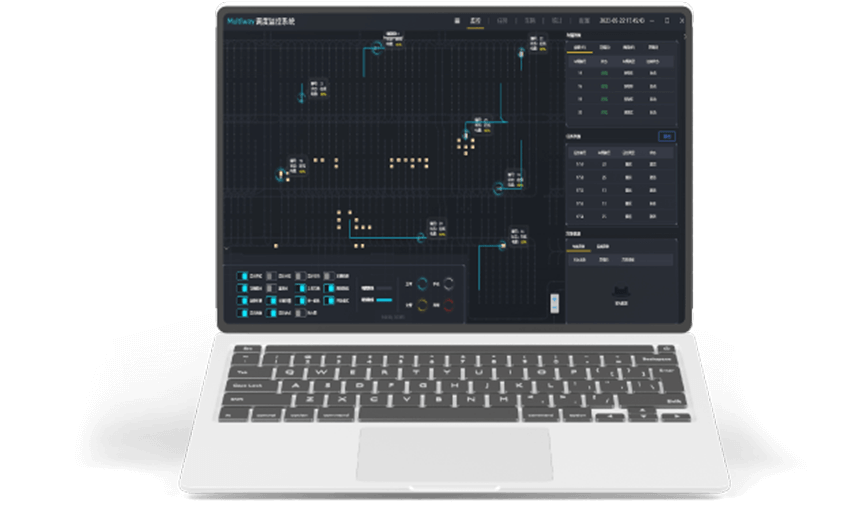
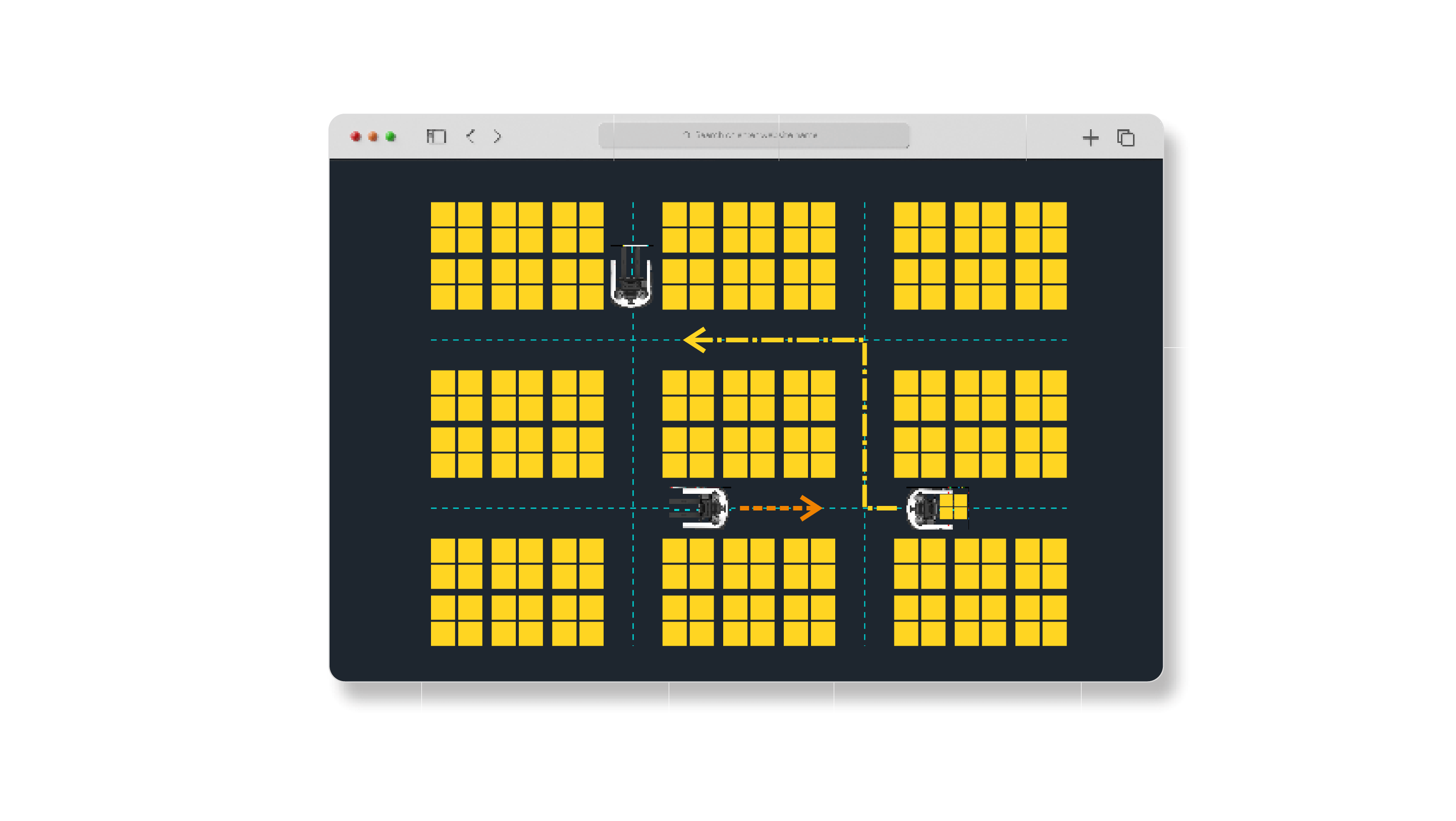
El sistema de control de robots Multiway (Multiway RCS) puede soportar simultáneamente el funcionamiento colaborativo de cientos de vehículos de diferentes modelos en la misma zona. Puede planificar rápidamente las rutas óptimas y lograr la planificación global óptima de la ruta de navegación, completando así las tareas en el menor tiempo posible y garantizando la máxima eficacia operativa.
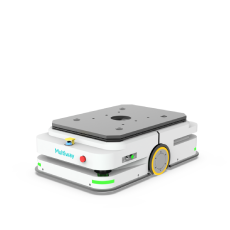
Integra carretillas elevadoras autónomas, lanzaderas de cuatro vías y AMR en el mismo sistema de control. Compatible con uno o varios modos de navegación, como la navegación láser y la navegación aérea

Creación de un mapa del entorno

Planificación óptica de rutas

Programación inteligente del control del tráfico

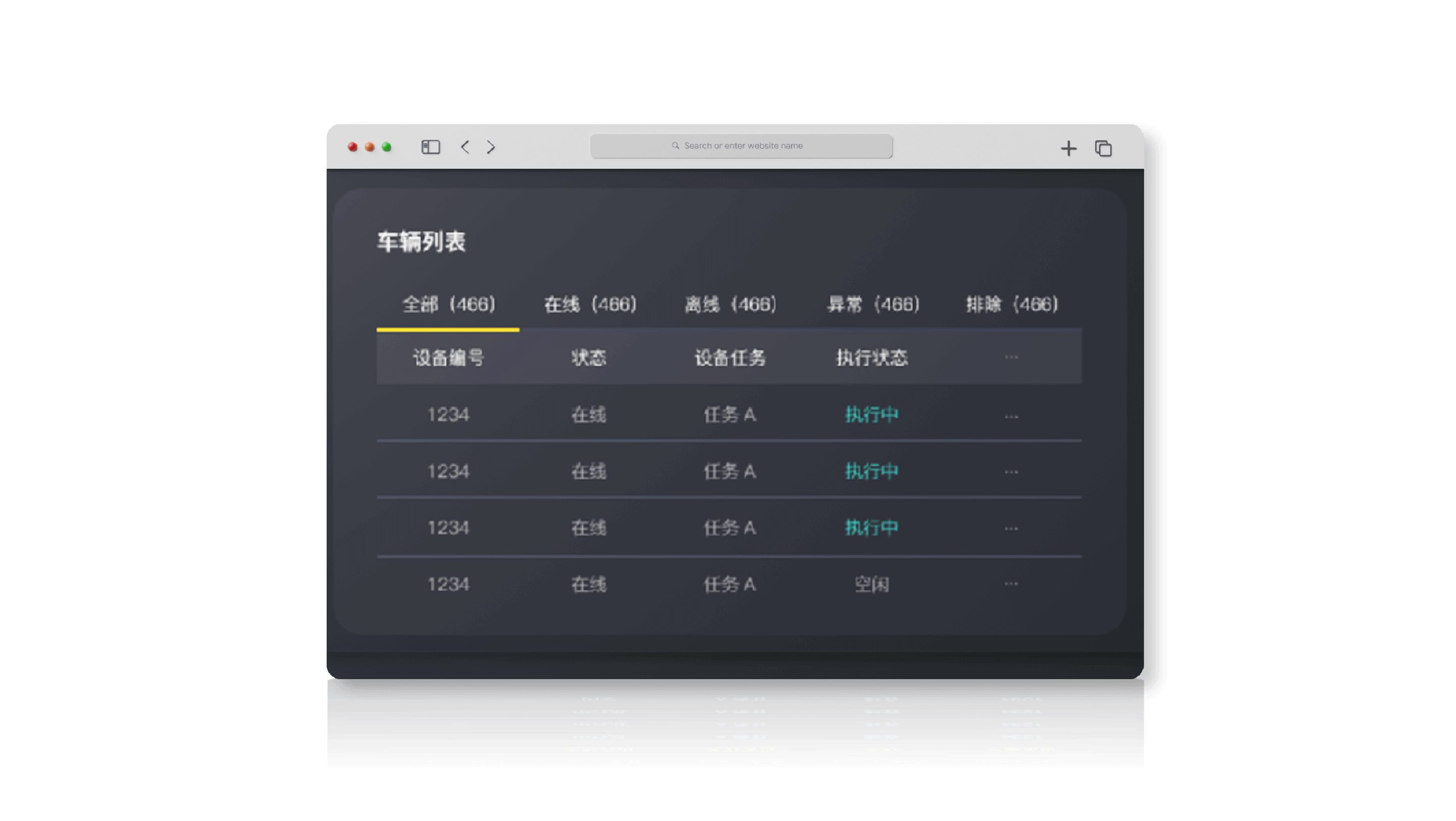
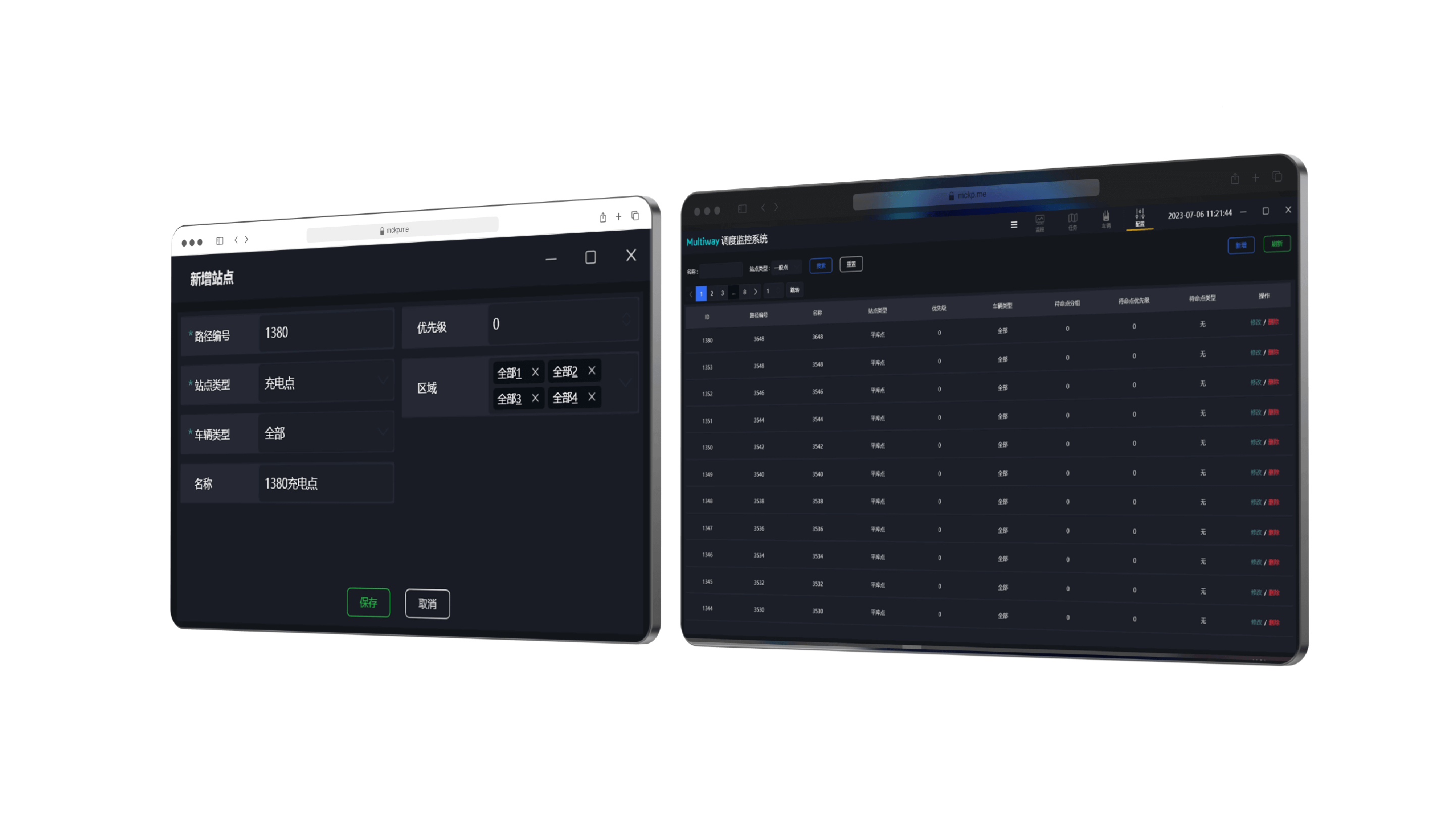
Monitorización y gestión de equipos

Envío de vehículos a proximidad

Organización inteligente de tareas
01
Monitorización dinámica
02
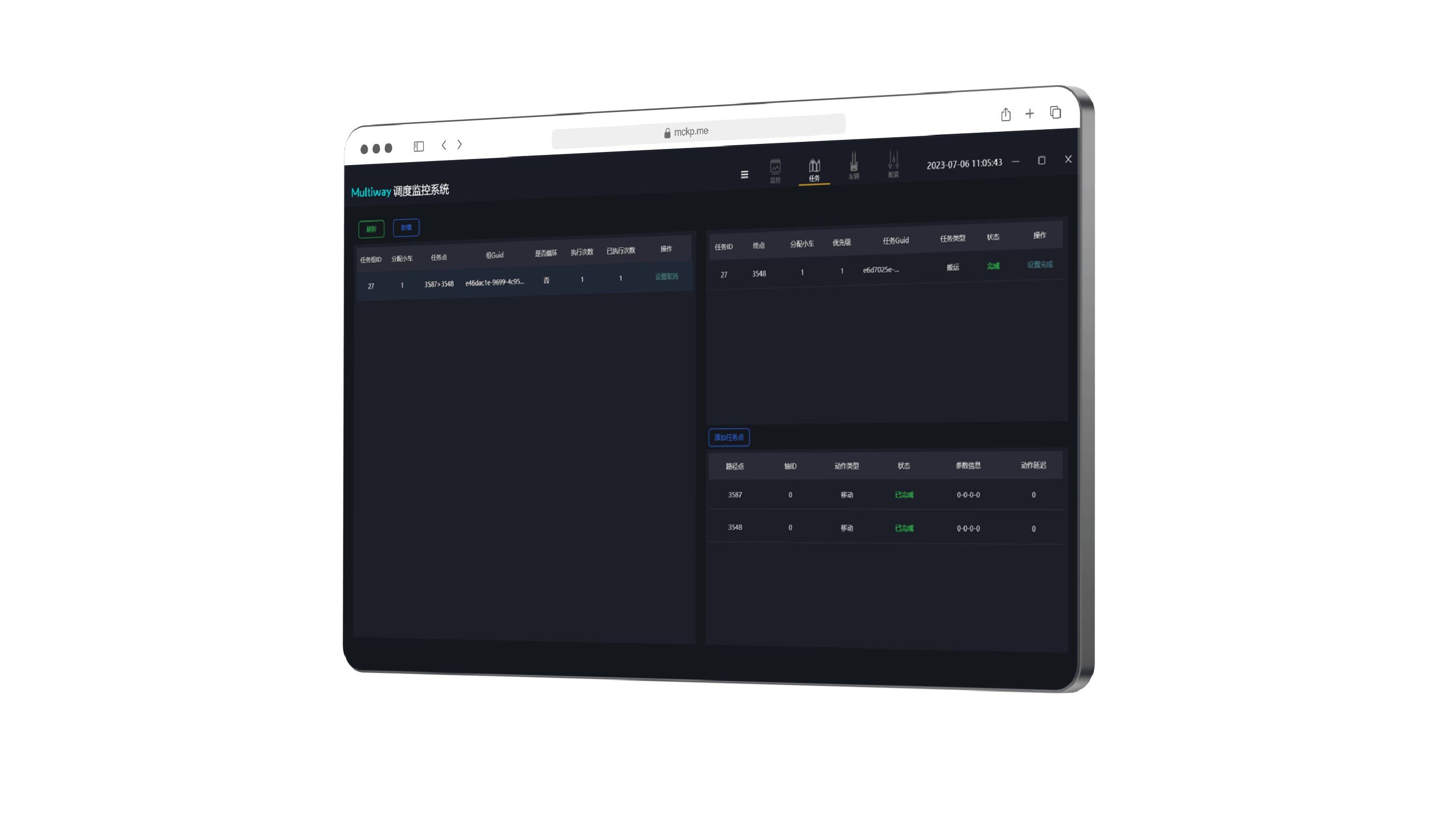
Gestión de tareas
03
Gestión de vehículos
04
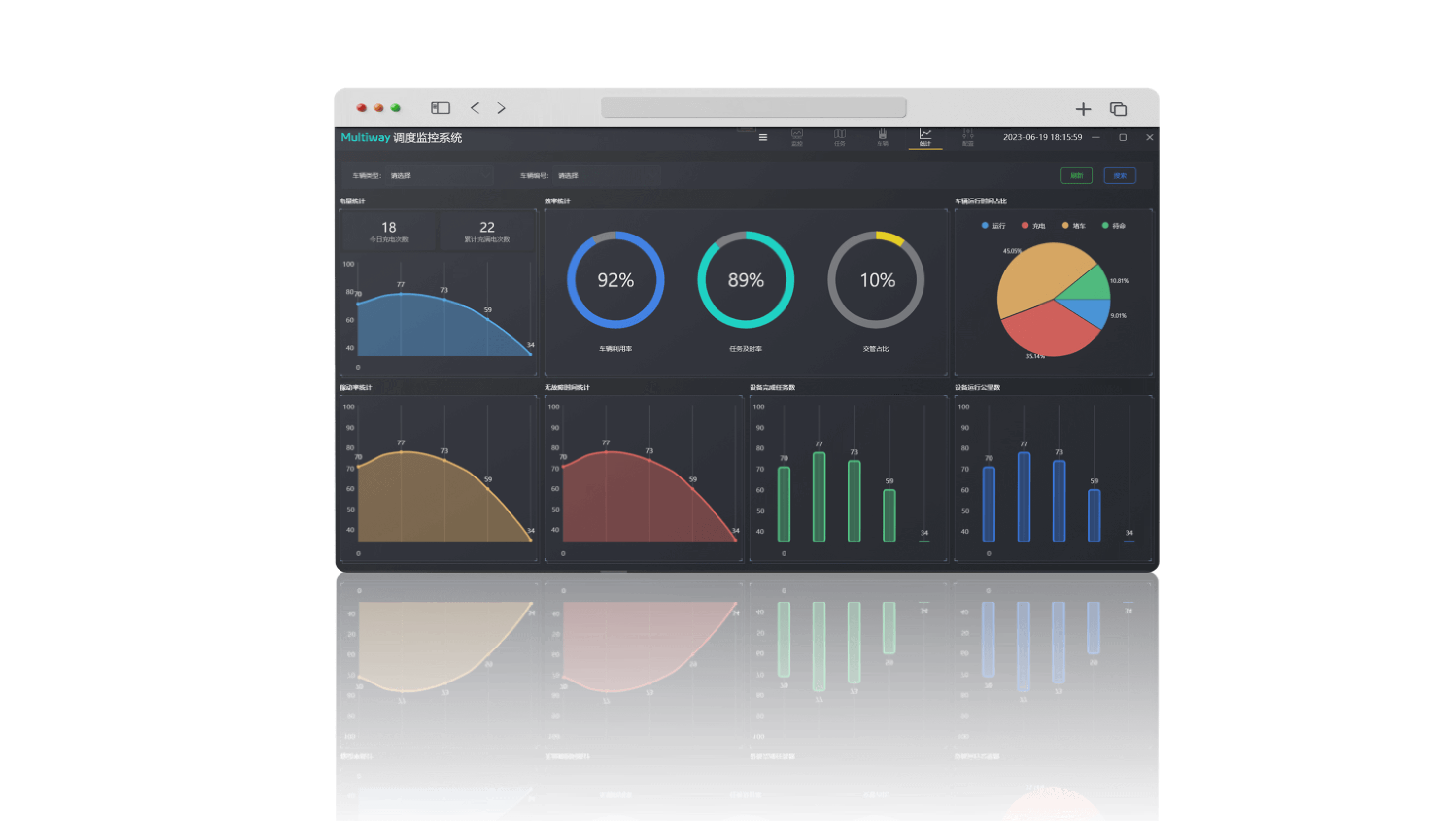
Informe de estadísticas
05
Control de trafico
06
Gestión de equipos
07
Configuración del sistema


Línea directa de asistencia
+86 133 9286 4873
Correo electrónico: sales@mw-robot.com




Envíenos un mensaje




